ich möchte euch hier mein "Universal PKW-Chassis 1:87 Origami" vorstellen. Da ich gerne "reproduzierbare" Sachen baue, sollen die Teile für den Bausatz soweit wie möglich aus 0,3 mm Neusilberblech entstehen weil ich möglichst ohne weitere "Zulieferer" (außer natürlich Empfänger, Motoren, also elektrik)auskommen möchte.
Daher habe ich versucht meine Lenkung auch komplett in Blech zu halten. Mich würde Eure Meinung interessieren, ob die Lenkung sinnvoll ist und ob meine dafür angestrebte Übersetzung überhaupt funktioniert.
Hier also zu den Daten:
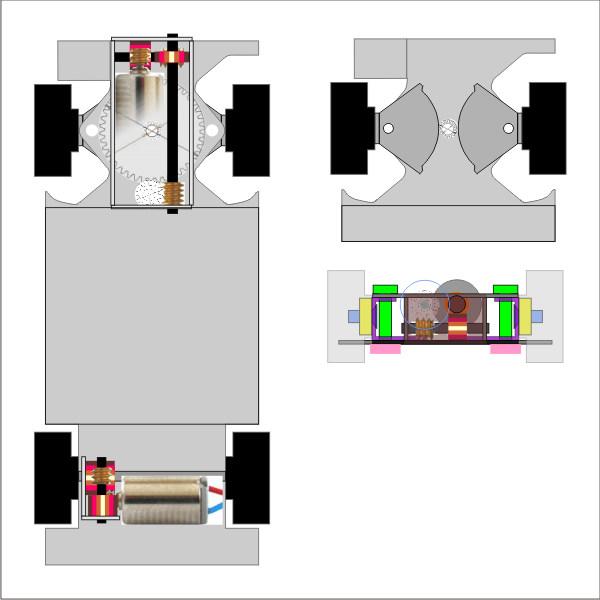
0,3 mm Neusilber Blech / 2 x 4x8mm Motoren (wohl ca. 25.000 U/min) / diverse Zahnräder und Schnecken
Die Lenkng soll von einem Motor mit einer Schnecke mit 1 Umdrehung angetrieben werden. (weiß nicht genau wie man das nennt) Diese greift auf ein M0,2 10Z, dieses über eine Achse eine 1 Umdrehungs Schnecke auf M0,2 12Z, dieses über eine Achse eine Schnecke mit 1 Umdrehung auf M0,2 8Z, welches wiederrum ein M0,2 42Z antreibt. In der mitte des M0,2 42Z sizt ein weites Zahnrad. Dieses Zahnrad bewegt die "Lenkungspaddel". Hier dachte ich an ein M0,1 verzahnung um die Bewegung "fließender" zu Gestalten.
Laut meiner Berechnung mit 25.000 U/min würde das M0,2 8Z etwa 0,35 U/sec machen. Stimmt das? Wäre das eine sinnvolle Geschwindigkeit für eine Lenkung? Würde mich über Anregungen freuen.
Für die Lenkung würde ich allerdings noch eine Art Begrenzung (elektronisch, wie bei den Servos oder auch mechanisch mit Schaltkontakten) empfehlen, damit dir nix voll in die Endanschläge fährt und womöglich zerbröselt.
Aber das kann ja auch gut sein, dass so etwas auch schon angedacht ist und nur noch nicht mit hier eingebracht wurde...
P.S. Auf wie klein könnte man denn dieses Konzept herunter scalieren? Ich hätte da noch einige Fahrzeuge in 1:120 zu bewegen
Nette Grüße vom Toni
> Die Rechtschreib- und Gramatikfehler sind Ausdruck meiner Kreativität ...<
wegen der Begrenzung war ich mir nicht ganz sicher, da mir die kompletten RC-Erfahrungen fehlen. Wie man in der Zeichnung ja sehen kann, war mein "lenkanschlag" das entgegen gekrümmte Ende der Lenkpaddel. Schaltkontakte über Micro-Schalter oder wie meinst Du das? Ich habe auch schon überlegt, woher der Motor weiß, das er hier nicht mehr weiter drehen darf? Wie löst man sowas elektrisch? Kann ich den Motor so "programmieren" das er nur "X" Umdrehungen macht?
Zu Deiner Frage, die Vorlage kann ich später auf theoretisch jeden Maßstaß anwenden, solange die Zahnradbleche passend geätzt werden können. Ich stelle diese auch gerne nach beendigung aller Vorarbeiten zur Verfügung.
ich würd schon sagen, daß es ein Muß ist, daß die Lenkung von alleine wieder in den Geradeauslauf kommt. Sonst wird es sehr schwer und mühsam, auf der Straße zu bleiben. Dazu müsstest du nur ein kleines Poti und die Steuerplatine aus einem Servo einbauen. Die Achse, auf dem das Poti sitzt, darf dabei aber keine volle Umdrehung machen.
Du hast mit der Null-Stellung vollkommen Recht! Das hatte ich in dieser Planung bisher komplett übersehen! Wenn ein Poti keine volle Umdrehung machen darf, dann könnte ich es doch dirkt auf die Achse inder mitte Lenkung sezten!? Mir geht es natürlich bei dieser Lösung darum, so klein und platzsparend wie möglich zu arbeiten, damit das Chassis auch später mühelos in viele Modelle passt. Daher würde ich gerne auf weitere Platinen verzichten (außer für Sende- und Lichtfunktionen) Außerdem würde der zukauf eines Servos gegen die Grundidee verstoßen!
Zitat von Micro Außerdem würde der zukauf eines Servos gegen die Grundidee verstoßen!
Hm, dann wird dir das Poti aber auch nichts helfen. Denn irgend eine Elektronik muss das schon auswerten und den Motor ansteuern. Also musst du entweder selbst eine Elektronik basteln, oder eine aus einem alten Servo nehmen.
also als platzsparende Alternative zum Poti besteht die Möglichkeit, mit Graphitlack und einem Schleiferkontakt die Position der Lenkung zu erfassen. Natürlich wird dann weiterhin eine Servoelektronik benötigt. Zum Thema Elektronik wäre es doch interessant, wenn du dich noch mit den Entwicklern der Eigenbau-Fernsteuerung mit dem RFM-Modul (LINK) abzustimmen, denn in den Empfänger noch eine Art Servoelektronik einzubauen, wäre sicherlich möglich.
Also bedeutet, ich benötige mindestens 3 Platinen im Fahrzeug, wenn ich auch Licht anschließen möchte? Ich dachte an ein Licht-Tiny und den Siku IR , der ja anscheinend auch im Link behandelt wird für den Tip, Lukas. Das werde ich mal machen. Kann mir eigentlich jemand was zur Lenkungs Übersetzung sagen? Sollte das so funktionieren?
zu meinem Siku-Sender: ich hab da nur eine Fernsteuerung für Siku-Empfänger gebaut. Einen Empfänger selbst hab ich nicht programmiert, da der Preis und die Größe der käuflichen Empfänger top sind. Da lohnt der Eigenbau nicht. Den Code für die RFM-Geschichte werd ich nicht rausrücken. Ist und bleibt mein Projekt. Dort werde ich auch keine Servoregelung programmieren. Das Thema wird hier total unterschätzt. So ´ne Regelung übersteigt mein Können und meine Ausrüstung.
Wer das aber schon umgesetzt hat und auch zum Kauf anbietet, siehst Du hier: Regensburger Treffen 2011
Bei Deiner Eigenbau-Servo-Mechanik glaube ich aber, daß Du riesige Probleme bekommen wirst, wenn da nur das geringste Spiel drin ist. Bei der hohen Übersetzung wird das dann sehr schwierig für die Regelung, da kleine Bewegungen nicht an der Achse ankommen.
Ich würde das mit den 4mm-Planetengetriebe-Motoren mit 1:125er Übersetzung machen. Insgesamt bauen die kleiner als Deine Mechanik. Wenn Du die längs einbaust, hättest Du daneben noch Platz für die Regelungs-Platine. Diese würd ich aus nem 3$ HongKong-Servo ausbauen. Beim Conrad hab ich mal kleine Poti´s mitbestellt. Sind glaub ich 4x4mm groß.
@ diezel: Danke für die Informationen. Aber ich werden dann früher oder später bestimmt nochmal auf dich zukommen, da ich auch eine Fernsteuerung benötige An das Planetengetriebe hatte ich auch schon gedacht, ich denke ich werde in dieser Richtung weiter konstruieren.
@ Rc Bastler: Du meinst diese Geschichte mit dem Lenktrapez? Ich dachte das könnte man in dieser Größe vernachlässigen !? Oder macht sich das enorm bemerkbar? Gibt es da vielleicht Erfahrungsberichte?
Nachdem hier viele Leute ihre Lenkachsen sogar falschrum einbauen, sollte es sich wohl nicht all zu sehr auswirken. Aber selbst ausprobiert habe ich es nicht. Es kommt sicher auch darauf an, ob man sowieso schon Probleme mit der Lenkung hat (z.B. zu wenig Gewicht auf der Achse).
Hey Snoopy, meinst Du mit falsch herum das die Achsschenkel nach vorne und nach innen geneigt sind? Gewicht soll eigentlich nach neuer Planung durch den 4mm Planetengetriebe Motor entstehen. Laut meiner Zeichnung hätte das äußere Rad einen Winkel von 33° , während das innere einen Winkel von 40° einschlagen würde. Ich kann mir garnicht vorstellen das es bei einem Modell so einen Unterschied macht, aber Fahrberichte währen natürlich am hilfreichsten. Ich denke je weicher die Reifen sind desto "genauer" sollte die Kurvenfahrt sein.... was mich auch schon an einen Drifter denken ließ
nettes Projekt... Mit nem Fahrbericht kann ich helfen. Bei meinem 911 ist jedes Spiel in der Lenkung ganz negativ fuer die Fahreigenschaft gewesen. -Dreifachschneckengetriebe wie im ersten Bild, einfach vergessen, viel zu langsam und Spiel im Getriebe mit normalen Mitteln nicht beherrschbar. -Lenktrapez ist toll. Dein Konstrukt ist ne gute Idee aber wohl eher nicht fuer die Lenkung. Spiel im Getriebe wieder schwierig plus Geometie.
da addiert sich ne ganze Menge, denk nochmal drueber nach, IMHO stark verbesserungsfaehig.
Mein erster 911 hat nen 1:144 Antrieb gehabt, lahm... 1:12 war nur mit Elektroniktrick fahrbar... 1:35 wuerde ich heute nehmen, oder sowas in dem Gebiet.
Georg
Der Kluge lernt aus allem und von jedem, der Normale aus seinen Erfahrungen und der Dumme weiß alles besser. -Sokrates-
 Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
 Mikromodell-Chat
Mikromodell-Chat
 2
2

 Offline
Offline





 .
.
