hier möchte ich mein neues Projekt vorstellen. Ich will den Geiger Bagger von herpa umbauen. Dazu will ich folgende Komponenten verbauen: - Deltang Empfänger 7 Kanal - Motortiny2 (6-8 Stück) - 2-Kanal-Schalter - Gizmo Getriebemotore 1:699 (5 Stück) - Mikroantrieb Getriebemotor 1:2024 - Lipo 180mAh
Zur Zeit bin ich in der Planung für den Bagger, da ich den Akku in den oberwagen einbauen will, damit der Bagger noch ausreichend Bodenfreiheit hat. Des weitern soll in diesem Bagger kein Servo verbaut werden.
Die Getriebeblöcke für den Fahrantrieb sind bereits gefräst und werden genau so aufgebaut, wie die für den DEMAG Seilbagger.
Hallo Alex, bin sehr gespannt und versuche das Projekt zu verfolgen. Ich möchte gelegentlich auch einen Umbauen und steht schon im Regal aber erst muss ich noch Kippsattel und Radlader fertig machen sonnst wirds nix.
Habe mir über Antrieb auch schon gedanken gemacht,was würde dagegen sprechen wenn man den Antrieb mit 2x G90 von Sol machen würde , Kraft wäre da ?
es gibt drei Gründe dafür, warum ich nicht die G90 für den Bagger verwende. 1.) Bei den G90 Getieben muß man unbedingt noch eine Getriebestufe mehr einbauen. Dies habe ich z.B. bei meinen blauen Mencks gemacht. Funktioniert einwandfrei, abe dadurch wird das Getriebe noch größer 2.) Ohne dieser zusätzlichen Getriebestufe ist die Gesamtgröße insgesamt größer, als die Gizmo - Getriebe. Bei den Gizmo Getriebe wird ein 6mm Motor vewendet. Bei den G90 Getriebe ist da schon ein 7mm Motor eingebaut. 3.) Preisfrage.
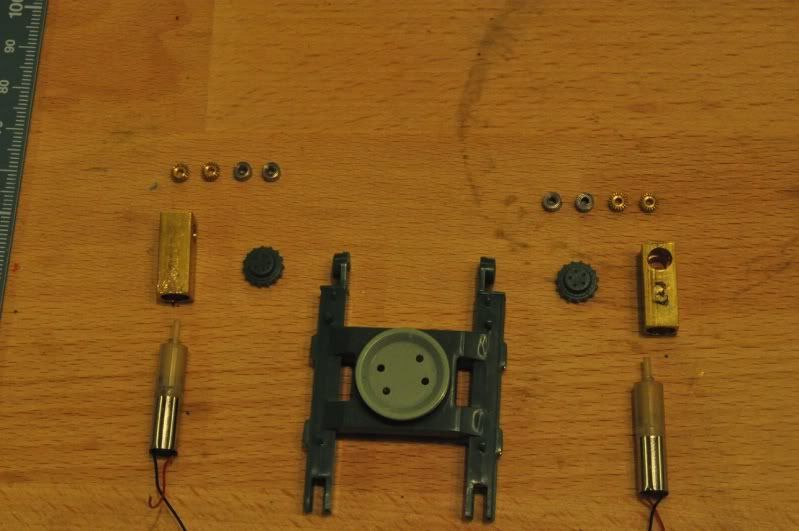
in dieser Woche bin ich ein bischen mit den Getieben für den Kettenantieb voran gekommen. Für den Getriebeblock wurde ein 7*7mm Vierkant-Messing verwendet, wo in der Längsachse ein 6,2mm Sackloch gebohrt wurde. Für die 90 Gard Umlenkung der Antreibsachse wurde quer ein 4mm Loch duchgebohrt, daß dann ca. 2/3 mit einem 5mm Bohrer aufgebohrt wurde, damit das Kegelzahnrad genügend Platz hat. In das 4mm Loch wurde ein Kugellager eingesetzt.
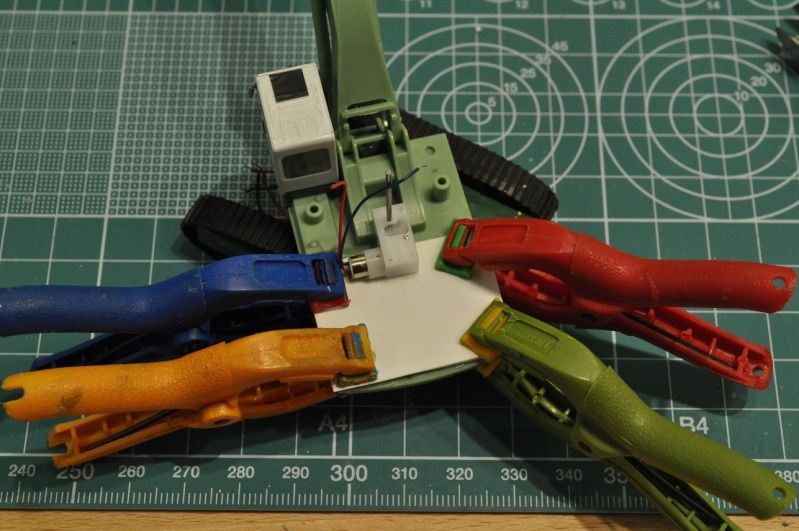
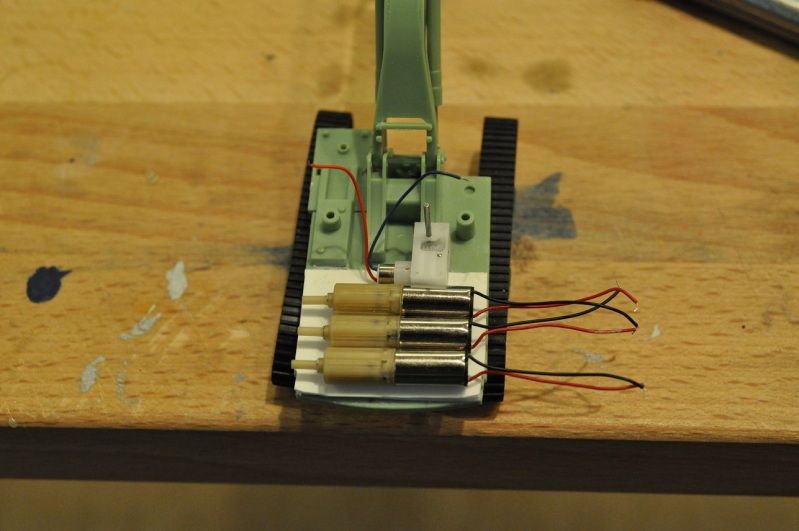
Hier die Zutaten für den Antrieb:
Auf den Gizmo Motoren wurde ein Kegelzahnrad von Lemo befestigt:
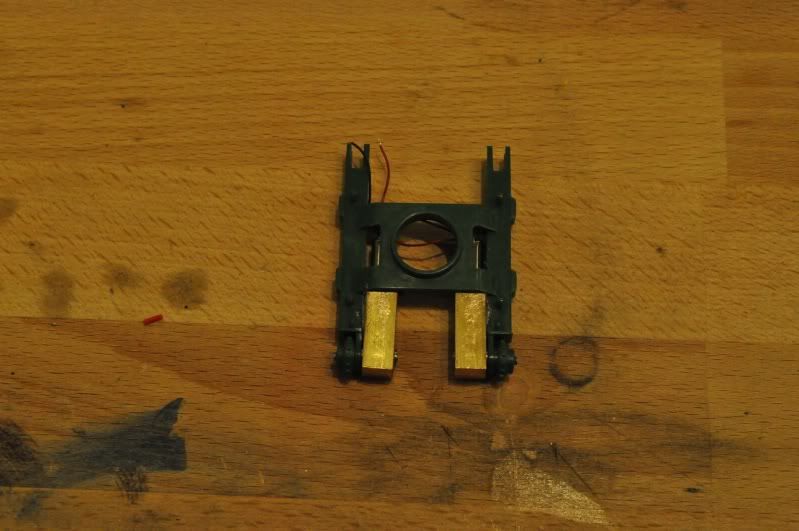
Die einzelnen Baugruppen für eine Antriebseinheit:
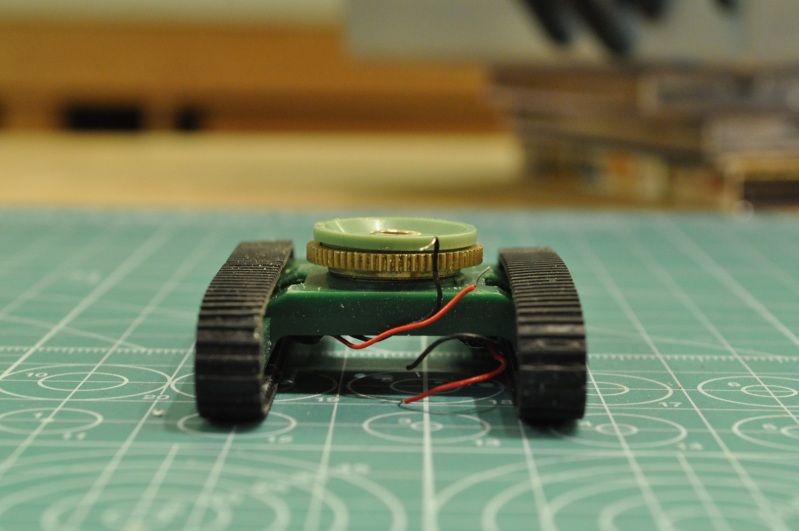
heute habe ich mir mal dem Drehkranz gewidmet. Als Zutaten wurden gewählt: - Lemo Zahnrad - Axial-Rillenkugellager - selbst gedrehter haltebolzen mit Durchbohrung
Das Zahnrad von Lemo mit 60 Zähnen wurde auf der Zahnradseite 1,5 mm abgedreht. Danach erfolgte eine 10mm Bohrung, 5mm tief für das Axial-Rillenkugellager. Danach erfolgte eine 12mm Bohrung 1mm tief, damit der Drehmeisel Platz hatte, daß ich es auf 18,5mm aufdrehen konnte. Als zweites wurde der Haltebolzen gedreht. Dazu wurde ein 6mm Rundmessing auf 5mm abgedreht. Danach erfolgte die Durchbohrung mit 3,5mm, damit später die Leitungen für den Kettenantrieb durchgeführt werden.
Danach wurde der neue Drehkranz zusammengebaut.
Vom originalen Drehkranz wurde das obere Stück für die Aufnahme des Oberwagen behalten.
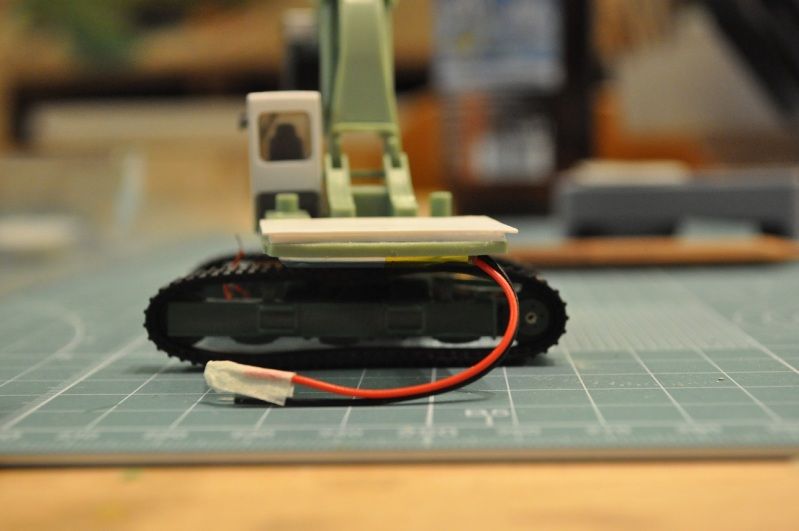
mühselig ernährt sich das Eichhörnchen. Letzte Woche habe ich den Akku-Schacht und das Drehgetriebe eingebaut.
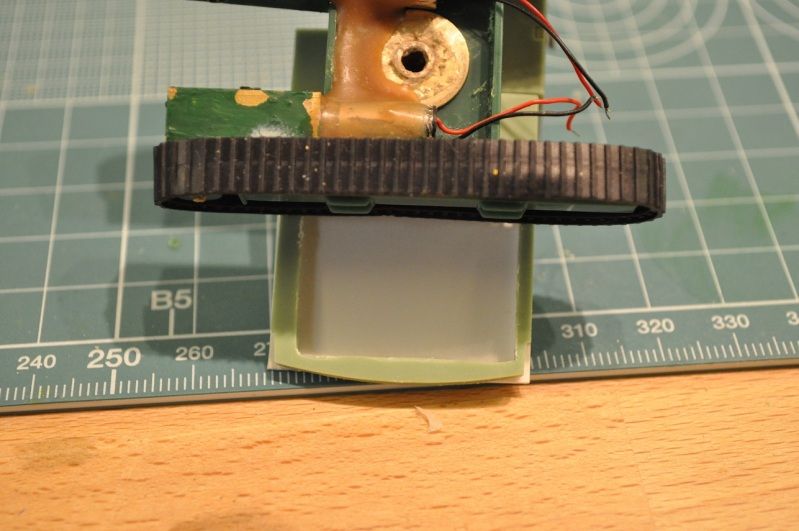
Akkuschacht:
Da ich den Akku bei diesem Bagger diesmal in den Oberwagen einbaue, mußte ich aus Platzgründen den Akku in einem Schacht einbauen, da die Bodenplatte vom Bagger schon 2mm hat. Dies wollte ich ausnutzen. Der Akku selber wird in Zukunft minimal herausschauen. Wenn dann noch die Getriebemotoren eingebaut sind, habe ich immer noch ca. 4mm Luft für die Elektronik. Dies sollte genügen. Für den Akkuschacht habe ich eine Öffnung in die Bodenplatte ausgeschnitten. Danach wurde das ganze mit 1mm Plastikprofil aufgebaut und dann eine 0,5mm Platte verschließt den Schacht von oben.
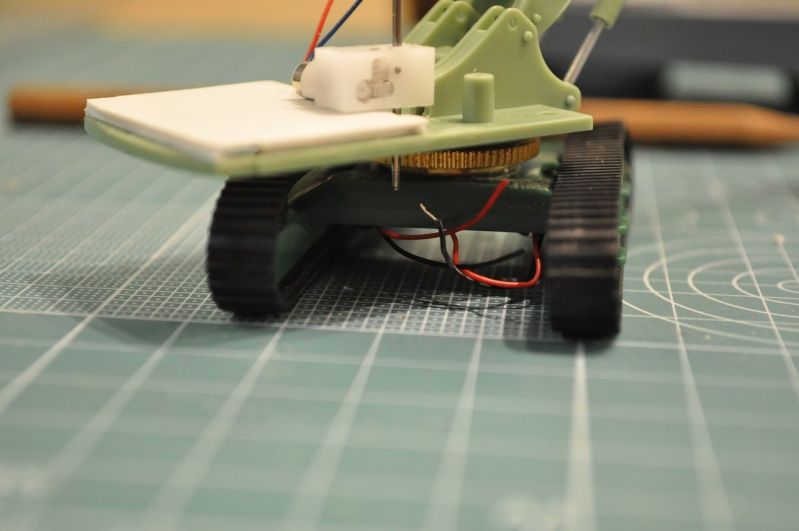
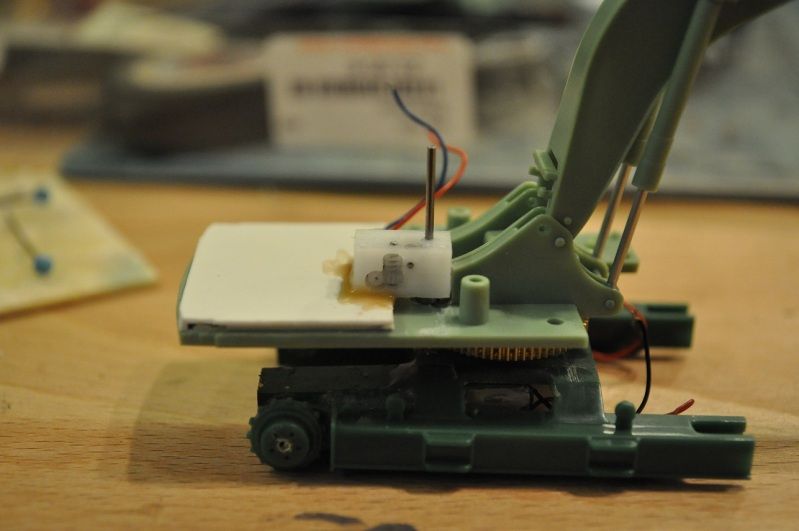
Drehgetriebe:
Als Drehgetriebe wollte ich diesmal ein 1:2000er von Mikroantriebe verbauten. Bei den ersten Test ergab sich, das der Bagger mit diesem Getriebe 10 Sekunden benötigt, um eine Umdrehung vollständig zu vollziehen. Damit kann mal dann Zielgerecht die Schaufel über den LKW platzieren. Das Getriebe wurde auf einer Seite mit einem 9er Zahnrad Modul 0,3 versehen und auf die Bodenplatte vom Akkuschacht geklebt. Eine Stellprobe ergab, daß die 3 1:700er Gizmo Getriebe auch noch genügend Platz haben.
bei dem Bagger soll der Mono-Arm und die Baggerschaufel mit einer Gegenzugseiltechnik angesteuert werden. So die Planung. ich muß dann im Einzelfall dann endscheiden, ob man es umsetzen kann. Der Monoarm sollte funktionieren, da ich es schon bei meinem 962er so umgesetzt habe. Bei der baggerschaufel bin ich mir da noch nicht sicher.
Bei meinem Atlas habe ich aus Platzmangel leider auf diese Technik verzichten müssen. Da sind alle Armfunktionen auf der bewährten Gummirückzug Technik aufgebaut.
also bei meinen Bagger wird der Monoarm mit Zahnsegment und Sriel, so wie Löffel mit Gegenzugtechnik gesteuert. Aber ich sage Dir das muss aufs Tausenstel ausgekniffelt sein. Denn wenn Du z.B. 1,85 mm abspulst musst Du auch genau 1,85 mm aufspulen, sonnst verkeilt sich alles. Das über die vielen verschiedenen Umlenkpunkte hin zu bekommen ist gar nicht so einfach.
HighTrucker
Versuch es nur, es ist schwieriger als Du denkst !
 Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
 Mikromodell-Chat
Mikromodell-Chat
 1
1

 Offline
Offline